Collaborators: Aaron Hill, Dr. Patrick Beeson, Dr. David Kortenkamp
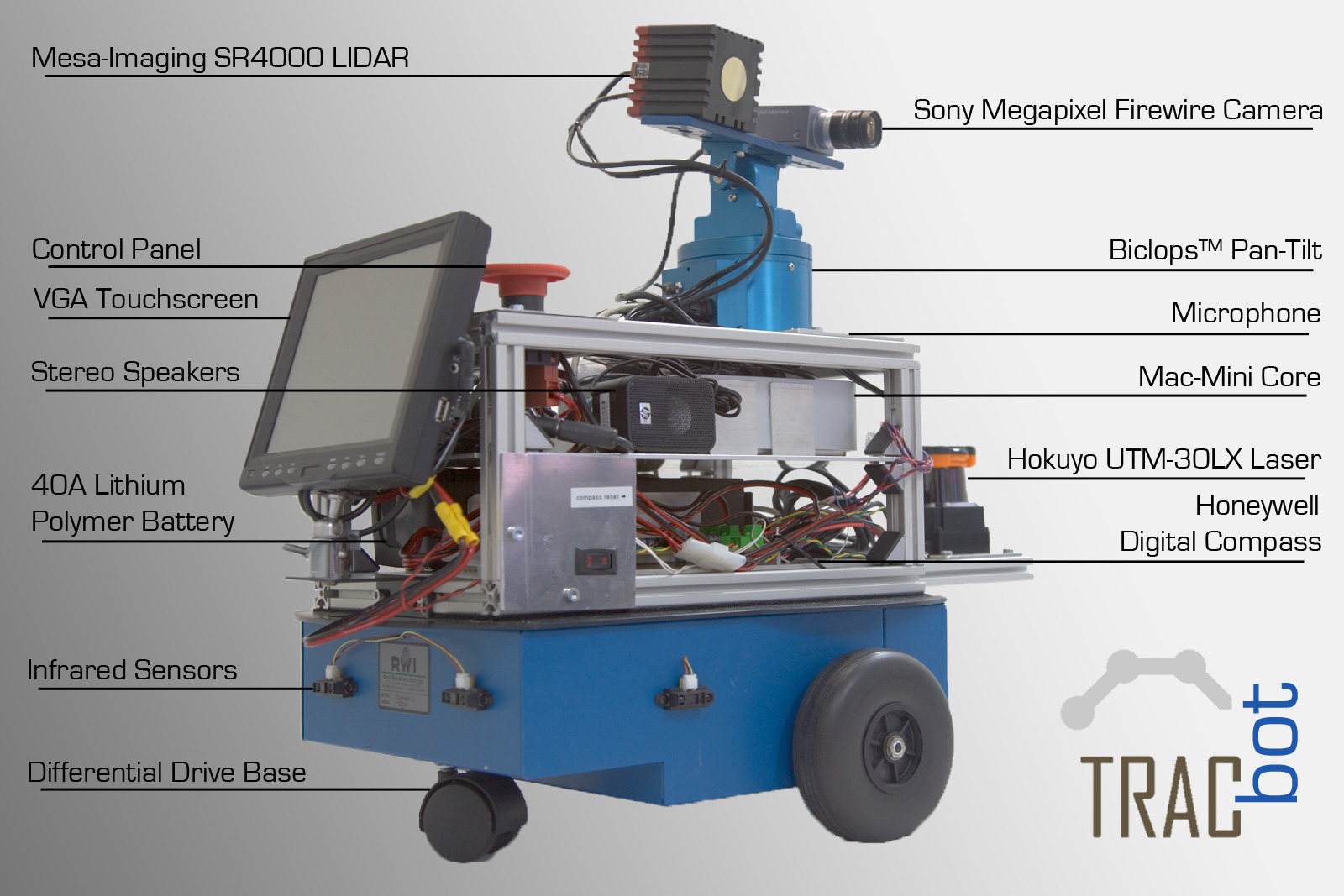
TRACBot is a differential-drive robot I built from the ground up while interning at TRACLabs, Inc. I designed the robot to work with the Player/Stage/Gazebo software stack, the predecessor to the now-popular ROS framework. I integrated a wide variety of sensors such as LIDAR, thermal sensors, infrared rangers, cameras, and microphones. I also helped design the software architecture to exploit this rich sensory data. After my internship ended, I was hired as a part-time programmer to fabricate simulated 3D models and environments for the robot. Working on TRACBot exposed me to problems in robotics I might never encounter in academia, and it was an incredible learning experience.
Relevant Technologies
Robot design, sensor prototyping, software drivers, C++, Python, Player/Stage, Gazebo