Collaborators: Nadia Cheng, Maxim Lobovsky, Steven Keating, Katy Gero, Anette Hosoi, Karl Iagnemma
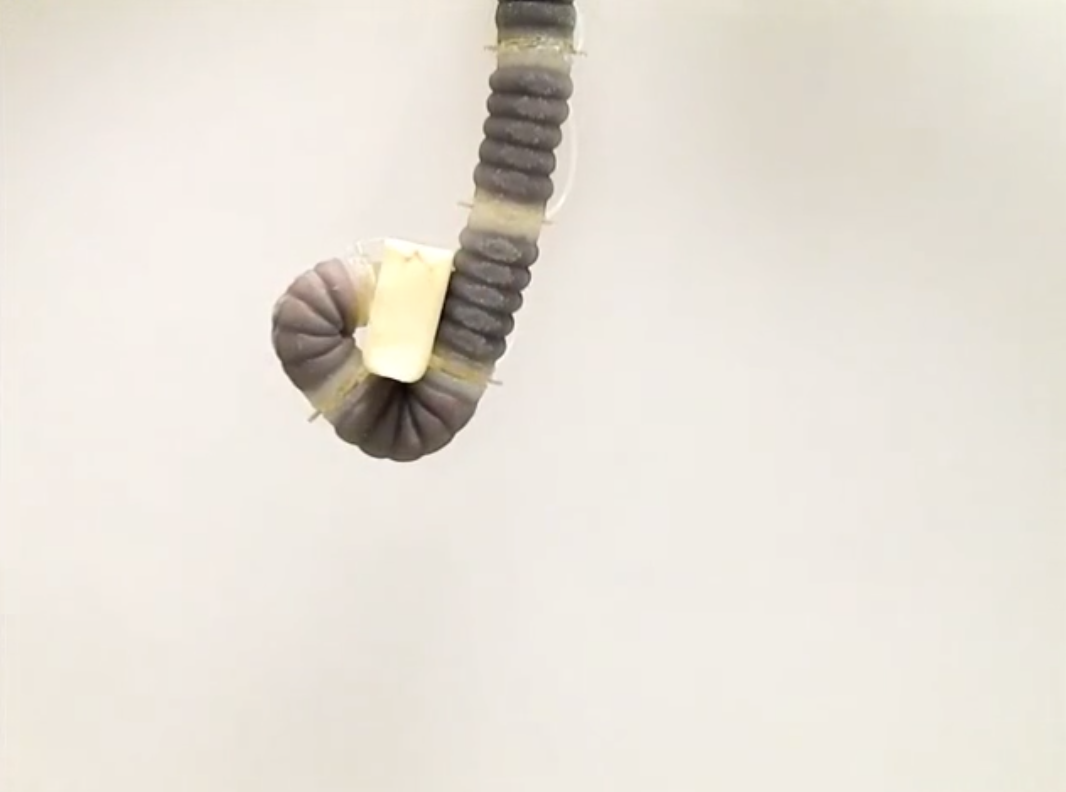
This highly articulated snake-like robot uses non-traditional actuators. Through reverse jamming of granular media by creating a vacuum, the segments of the manipulator can individually transition between solid-like states and fluid ones. Combined with traditional off-board motors and tension cables to achieve complex manipulator configurations, I helped design the software that enabled the motion of the platform.
Relevant Publications
Nadia Cheng, Maxim Lobovsky, Steven Keating, Adam Setapen, Katy Gero, Anette Hosoi, and Karl Iagnemma. Design and Analysis of a Robust, Low-cost, Highly Articulated Manipulator Enabled by Jamming of Granular Media. 2012 IEEE International Conference on Robotics and Automation (ICRA 2012).
Relevant Technologies
C, C++, Vicon