Adam Setapen
robots for people
Portfolio
Resume
About
Adam Setapen
robots for people
Portfolio
Resume
About
Portfolio
Remedy Robotics
Canvas Construction
Primed Technologies
Mayfield Robotics
Dragonbot
Romo
MARIONET
Nimbus
Playtime Computing
3D Robotics
electrello
AltSchool
Formlabs
GaitMate
MDS
RoboCup
SeedPower
SnakeBot
Telescrapbook
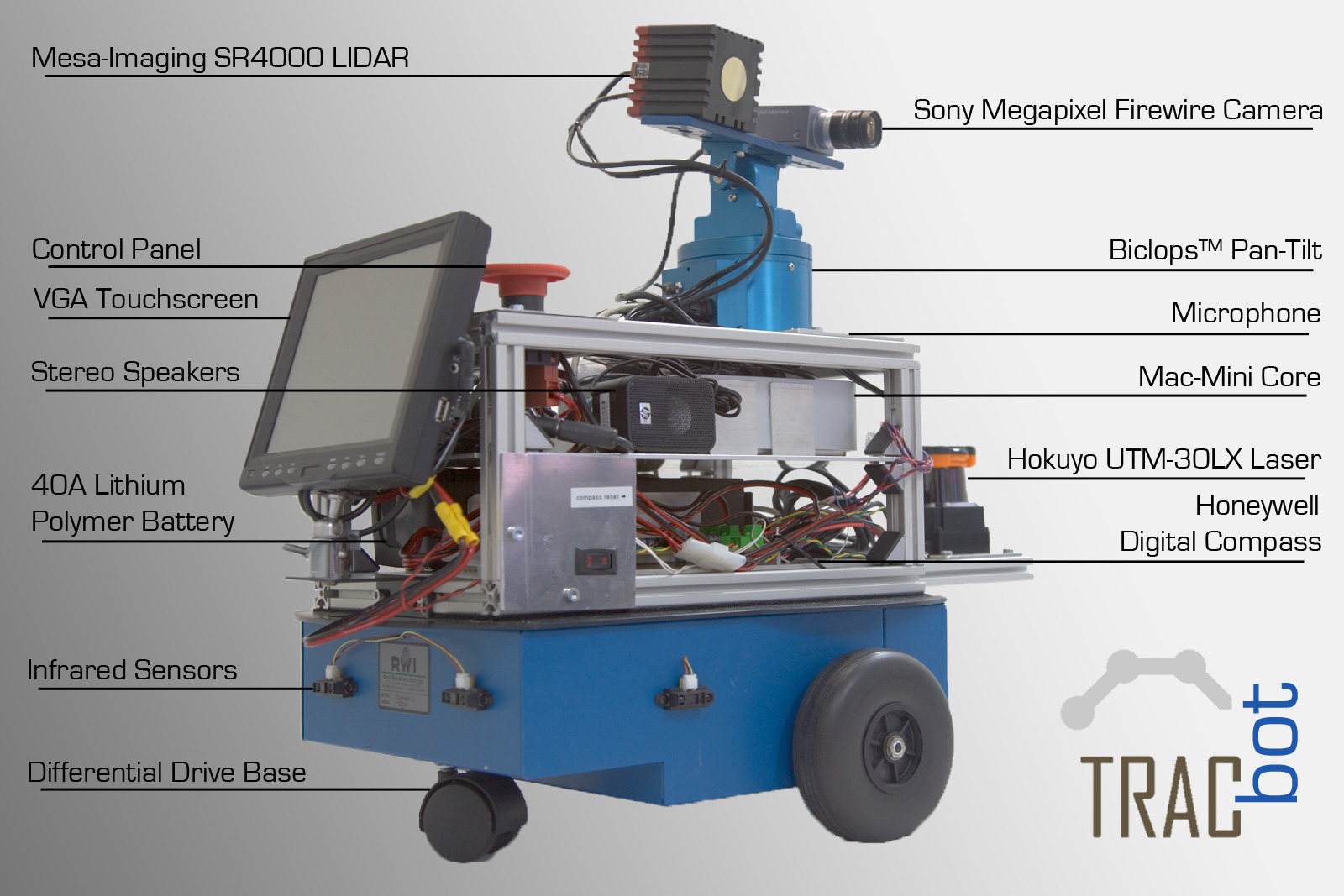
TRACBot
artbots
Cnidarian
Code Samples
Publications